Регулятор оборотов шуруповерта и схема его элементов
Содержание
- 1 Регулятор оборотов шуруповерта
- 1.1 Схема
- 2 Регулятор усилия шуруповерта
- 3 Электронная регулировка частоты вращения шуруповерта
В этой статье мы рассмотрим устройство шуруповерта. Уделим особое внимание таким ответственным деталям в конструкции, как регулятор оборотов шуруповерта. Кроме того, разберемся, как устроен регулятор усилия шуруповерта. Подробно опишем процесс изготовления регулятора оборотов своими руками, а также ознакомимся с такой функцией шуруповерта, как автоматическая регулировка оборотов.
Регулятор оборотов шуруповерта
Электрический шуруповерт работает либо от сети 220 В, либо от аккумуляторной батареи. Его мощность зависит от величины напряжения аккумулятора. Скорость вращения шуруповерта начинается от 15 000 об/мин. Кроме того, шуруповерт, который работает от сети, имеет 2 скорости вращения: более медленную для вкручивания, более высокую для сверления. Внутри кнопки подачи питания располагается регулятор оборотов. Довольно миниатюрный размер этого узла инструмента достигается при помощи микропленочной технологии. Его основной деталью является симистор. Принцип работы регулятора следующий:
Кроме того, шуруповерт, который работает от сети, имеет 2 скорости вращения: более медленную для вкручивания, более высокую для сверления. Внутри кнопки подачи питания располагается регулятор оборотов. Довольно миниатюрный размер этого узла инструмента достигается при помощи микропленочной технологии. Его основной деталью является симистор. Принцип работы регулятора следующий:
- При включении кнопки на управляющий электрод симистора подается переменный ток, имеющий синусоидальную фазу.
- Происходит открытие симистора, ток начинает проходить через нагрузку.
Время срабатывания симистора зависит от амплитуды управляющего напряжения. Чем больше амплитуда, тем раньше происходит срабатывание симистора. Величина амплитуды задается при помощи переменного резистора, соединенного с кнопкой пуска. Схема подключения кнопки отличается в разных моделях. К регулятору оборотов возможно подключение конденсатора.
Зачастую в нынешних экономических условиях не всегда покупатель может себе позволить полноценный дорогой шуруповерт от именитых фирм. В более дешевых моделях такой функции может и не быть. Но это не повод отчаиваться. Регулятор оборотов можно собрать самостоятельно, о чем мы и поговорим ниже.
В более дешевых моделях такой функции может и не быть. Но это не повод отчаиваться. Регулятор оборотов можно собрать самостоятельно, о чем мы и поговорим ниже.
Регулятор оборотов шуруповерта собирается на основе ШИМ – контроллера и ключевого многоканального полевого транзистора. Управление работой этого узла инструмента осуществляет резистор. Его положение зависит от давления на кнопку пуска шуруповерта.
Направление вращения рабочего органа меняется путем смены полюсов напряжения, которое подается на щетки двигателя. Инструментально это осуществляется при помощи перекидных контактов, приводящихся в действие рычажком реверса.
Собрать такой регулятор возможно своими руками. Как это сделать, мы рассмотрим ниже.
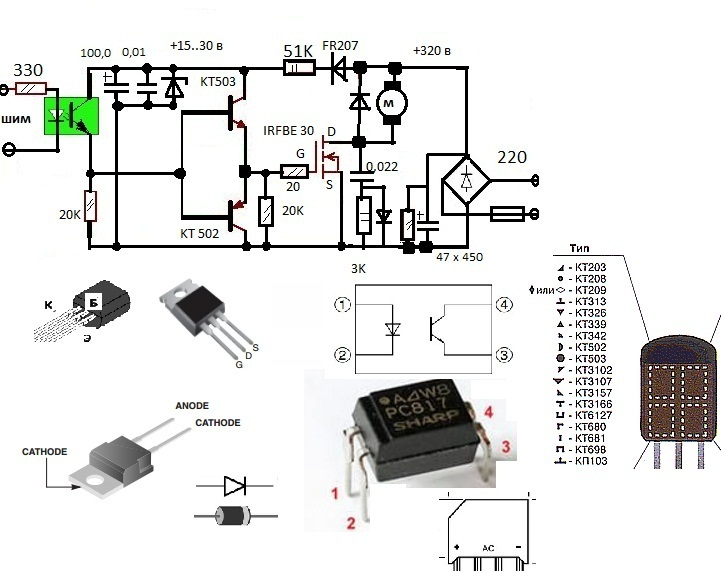
Схема элементов, входящих в состав регулятора оборотов, представлена на рисунке ниже.
Схема
В данном случае используется микросхема сдвоенного компаратора LM 393. Здесь первый компаратор работает как генератор пилообразного напряжения, на втором выполнена ШИМ. Сигналом управления для ШИМ служит падение напряжения на контактах двигателя. Если говорить упрощенно, то на схеме электродвигатель выглядит как активное и индуктивное сопротивления, соединенные последовательно между собой. При изменении нагрузки изменяется соотношение этих сопротивлений соответственно, регулятор же контролирует это и меняет заполнение ШИМ, тем самым стабилизируя обороты.
Сигналом управления для ШИМ служит падение напряжения на контактах двигателя. Если говорить упрощенно, то на схеме электродвигатель выглядит как активное и индуктивное сопротивления, соединенные последовательно между собой. При изменении нагрузки изменяется соотношение этих сопротивлений соответственно, регулятор же контролирует это и меняет заполнение ШИМ, тем самым стабилизируя обороты.
В качестве источника питания для ШИМ следует использовать электронный трансформатор. Он представляет собой полумостовой преобразователь напряжения из 220 в 12 В, который используется для питания галогеновых ламп освещения. Его размеры сопоставимы с размерами спичечного коробка. Цена колеблется в пределах 2–3 у. е. К нему необходимо добавить выпрямитель на выход (это четыре диода, к примеру, КД 213), а также конденсатор емкостью в несколько тысяч микрофарад на 25 вольт. Все это будет составлять импульсный источник питания с постоянным напряжением на выходе.
Отдельно стоит поговорить об изготовлении печатной платы для регулятора. Для ее изготовления необходим лист фотобумаги, лазерный принтер. Сначала необходимо напечатать рисунок на фотобумаге с помощью лазерного принтера, затем перенести его на заготовку платы с помощью нагретого утюга. Заготовка платы с прилепившейся бумагой ложится в емкость и подставляется под струю горячей воды. Это делается для того, чтобы желатиновый слой фотобумаги набух, и она отлепилась от платы. Оставшийся рисунок на плате протравливается хлорным железом.
Для ее изготовления необходим лист фотобумаги, лазерный принтер. Сначала необходимо напечатать рисунок на фотобумаге с помощью лазерного принтера, затем перенести его на заготовку платы с помощью нагретого утюга. Заготовка платы с прилепившейся бумагой ложится в емкость и подставляется под струю горячей воды. Это делается для того, чтобы желатиновый слой фотобумаги набух, и она отлепилась от платы. Оставшийся рисунок на плате протравливается хлорным железом.
Регулятор усилия шуруповерта
Регулятор усилия представляет собой муфту, ограничивающую усилие при вращении патрона. Она выполнена в виде вращающегося пластикового барабана. Величина ее затяжки регулируется с помощью цифровой шкалы, размещенной по окружности барабана. Увеличивая величину затяжки, тем самым вы глубже ввинчиваете саморез.
Эта функция будет необходима при работе с материалом изделий различной степени твердости, поскольку при работе с мягким материалом тело самореза будет легко утапливаться в нем, слишком высокая твердость материала будет способствовать нарушению геометрии шурупа, особенно если он небольших размеров. Трещотка, как еще называют регулятор, предотвращает срезание шлицев у саморезов, а также износ насадок шуруповерта. Затягивать регулировочное кольцо следует поэтапно начиная с самого небольшого усилия. В тех шуруповертах, в которых возможно производить сверление, последняя пиктограмма на кольце будет в виде сверла. В этой позиции достигается максимальный крутящий момент.
Трещотка, как еще называют регулятор, предотвращает срезание шлицев у саморезов, а также износ насадок шуруповерта. Затягивать регулировочное кольцо следует поэтапно начиная с самого небольшого усилия. В тех шуруповертах, в которых возможно производить сверление, последняя пиктограмма на кольце будет в виде сверла. В этой позиции достигается максимальный крутящий момент.
Электронная регулировка частоты вращения шуруповерта
Регулировать скорость вращения насадки шуруповерта возможно механически или автоматически. Автоматическая регулировка оборотов происходит при помощи процессора. Задать нужные параметры работы можно при помощи тумблера выбора скорости. Он расположен сверху корпуса. Во многих моделях регулировка оборотов реализована через кнопку пуска. Чем сильнее давление пальца на нее, тем выше будут обороты.
Прочитав эту статью, вы получили информацию о том, как собрать регулятор оборотов шуруповерта своими руками, ознакомились с конструкцией регулятора усилия, разобрались с функцией электронной регулировки инструмента. Надеемся, статья была вам полезной.
Надеемся, статья была вам полезной.
DKG-253 Электронный регулятор оборотов (Вых.акт. 10А) у официального дилера со склада в Екатеринбурге и Москве. Инструкции, схемы, описания.
О товаре
Особенности
Характеристики
Загрузки 1
Наличие
ЭЛЕКТРОННЫЙ РЕГУЛЯТОР ОБОРОТОВ DKG-253
DKG-253 — это недорогой электронный регулятор, предназначенный для регулирования частоты вращения двигателя с быстрой и точной реакцией на изменения нагрузки.
Устройство выполнено в классическом металлическом корпусе и состоит из одной печатной платы, покрытой эмалью, что обеспечивает надежную работу в суровых промышленных условиях.
Устройство оснащено регулируемым внутренним сигнальным реле превышения скорости со светодиодной индикацией. Это реле обеспечивает дополнительную защиту скорости в случае сбоя регулирования.
DKG-253 подключается к пропорциональному электроприводу прямого действия и магнитному датчику скорости. Он способен управлять широким спектром двигателей в режимах постоянной скорости (изохронный) или снижения.
- Работа на 12 и 24 В
- Способен управлять различными двигателями
- Выход привода прямого действия
- Быстрая и точная реакция
- Регулировка начальной подачи топлива
- Регулировка скорости нарастания
- Выход сигнала тревоги о превышении скорости
- Регулируемые номинальные и холостые обороты
- Изохронная и наклонная работа
- Регулировка усиления и стабильности
- Возможность внешней регулировки скорости
- Вход синхронизации и распределения нагрузки
- Непрерывный выходной ток 10 Ампер
- Обнаружение неисправности датчика скорости
- Защита от обратного напряжения батареи
- Защита от короткого замыкания на выходе
- Прочная конструкция
- Электронная схема, защищенная эмалью
DKG-253 Инструкция по эксплуатации. pdf (765 Кб)
pdf (765 Кб)
Руководство пользователя DATAKOM DKG-253 на русском языке.
Адрес склада и офиса
Режим работы
Наличие
Свердловская область, Белоярский район, поселок Прохладный, Весовая ул., д. 4
Нет в наличии
с 9:00 до 17:00 (Пн-Пт)
Подробнее о складе
Уважаемые клиенты!
По техническим причинам остатки склада в Москве временно не выгружаются на сайт. Уточняйте наличие у менеджеров компании.
Что такое электронный регулятор скорости и как работает ESC
Автор: Лорен Нагель
Опубликовано: 26 января 2022 г. Последнее обновление: 26 января 2022 г.
Последнее обновление: 26 января 2022 г.
Электронный регулятор скорости (ESC) является неотъемлемой частью аппаратная часть электродвигателя. Он действует как мозг системы, сообщая двигателю, как быстро двигаться, основываясь на сигналах данных, которые он получает от контроллера дроссельной заслонки.
Для небольших приложений, таких как дроны и радиоуправляемые транспортные средства, этот контроллер имеет название «ESC», тогда как для более крупных производственных приложений он может называться электронным блоком управления, инвертором или контроллером двигателя.
Рисунок 1: ESC Afro Race Spec 20A
Механизм внутри ESC, а также его взаимодействие с аккумулятором и двигателем весьма интересны. В этой статье мы расскажем об основах работы ESC, протоколах, которые они используют, и о том, как они используются для управления бесколлекторными двигателями и дронами.
Содержание
- Как работает ESC
- Компоненты ESC: микроконтроллер (MCU), драйвер затвора, полевые МОП-транзисторы, схема выпрямителя батареи (BEC), адаптер диспетчера устройств (DMA)
- Что такое ШИМ
- Протоколы ESC
- ESC для бесколлекторных двигателей
- ESC для дронов + Как выбрать ESC
Как работает ESC
Роль ESC заключается в том, чтобы выступать в качестве регулирующего посредника между аккумулятором и электродвигателем. Он управляет вращением двигателя, подавая синхронизированные электрические сигналы, которые преобразуются в изменения скорости. Он использует постоянный ток от батареи в сочетании с системой переключения для получения переменного трехфазного тока, который подается на двигатель.
Он управляет вращением двигателя, подавая синхронизированные электрические сигналы, которые преобразуются в изменения скорости. Он использует постоянный ток от батареи в сочетании с системой переключения для получения переменного трехфазного тока, который подается на двигатель.
Регулятор дроссельной заслонки транспортного средства используется для изменения скорости двигателя, будь то электромобиль, самолет или дрон. Увеличение дроссельной заслонки увеличивает выходную мощность, которая изменяет скорость, с которой переключатели открываются и закрываются в цепи ESC.
Рисунок 2: Контроллер обменивается данными с бортовым приемником дроссельной заслонки дрона
Существует несколько протоколов доставки сигналов, которые используются для передачи информации о дроссельной заслонке с пульта дистанционного управления на ESC. Каждый протокол имеет немного различную производительность, наиболее распространенными из которых являются PWM, Oneshot, Multishot и Dshot.
Самое важное различие между ними заключается в частоте сигналов, которые они передают. Более короткие частоты обеспечивают более быстрый сигнал и более быстрое время реакции дрона. Кроме того, протокол Dshot отличается от других тем, что он отправляет цифровой сигнал вместо аналогового. Это делает сигнал более надежным, поскольку он менее чувствителен к электрическим помехам и более точен благодаря более высокому разрешению. Мы рассмотрим это более подробно позже в этой статье.
Просмотрите результаты тестов ESC с помощью нашей базы данных производительности ESC
Компоненты ESC
Внутри ESC есть ряд важных компонентов, включая микроконтроллер, драйвер затвора и полевые МОП-транзисторы (рис. 3), а также схему выпрямителя батареи. и адаптер диспетчера устройств в некоторых случаях.
Рисунок 3. Ключевые компоненты ESC
Микроконтроллер (MCU)
Микроконтроллер играет три ключевые роли в работе ESC: 1) содержит микропрограмму, которая интерпретирует сигнал от контроллера и подает это в контуре управления, 2) отслеживание положения двигателя для обеспечения плавного ускорения, 3) отправка импульсов на драйвер затвора для получения желаемой команды
Прошивка, используемая в ESC, часто предварительно устанавливается производителем, но версии с открытым исходным кодом также можно получить из сторонних источников. В дронах для хобби предустановленная прошивка, как правило, представляет собой разновидность BLHeli (BLHeli_S или BLHeli_32), хотя также доступны другие программы, такие как SimonK и KISS. Выбранная прошивка должна быть совместима с аппаратным обеспечением, так как она будет определять производительность ESC и какие протоколы можно использовать.
В дронах для хобби предустановленная прошивка, как правило, представляет собой разновидность BLHeli (BLHeli_S или BLHeli_32), хотя также доступны другие программы, такие как SimonK и KISS. Выбранная прошивка должна быть совместима с аппаратным обеспечением, так как она будет определять производительность ESC и какие протоколы можно использовать.
Микроконтроллер также определяет положение двигателя с помощью сенсорной или безсенсорной системы. Сенсорные системы используют электронные датчики в двигателе для отслеживания положения ротора, что отлично подходит для низкоскоростных приложений с высоким крутящим моментом, таких как наземные транспортные средства. Более популярные безсенсорные системы используют обратную ЭДС для определения положения ротора относительно статора. Это прекрасно работает на высоких скоростях, хотя, когда двигатель вращается на более низких скоростях с меньшей противо-ЭДС, бездатчиковая система также не работает. Обычно это не проблема при управлении винтом.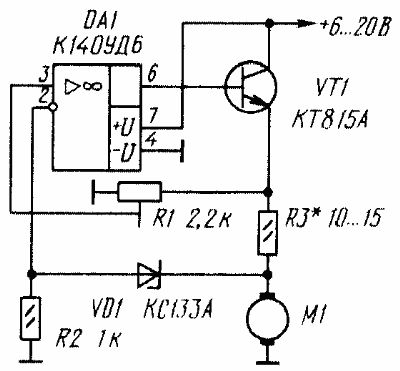 В целом, для высокоскоростных приложений бездатчиковая система более эффективна, дешевле и надежнее.
В целом, для высокоскоростных приложений бездатчиковая система более эффективна, дешевле и надежнее.
Драйвер затвора
Работа драйвера затвора заключается в том, чтобы действовать как посредник между контроллером и затвором MOSFET. Получив сигнал низкого напряжения от микроконтроллера, драйвер затвора усиливает сигнал и подает сигнал высокого напряжения на МОП-транзисторы. Драйвер имеет меньшее сопротивление, чем микроконтроллер, поэтому может выдавать более высокий ток, что также увеличивает скорость сигнала. Это обеспечивает более быстрое переключение и меньшее тепловыделение. Некоторые ESC имеют оптические чипы с изоляцией между низковольтным микроконтроллером и высоковольтными транзисторами. Производители могут называть эти ESC Opto-ESC.
MOSFET
Металлооксидные полупроводниковые полевые транзисторы или MOSFET — это переключатели, которые обеспечивают подачу питания к двигателю. ESC имеет шесть таких транзисторов, и каждый провод от двигателя подключается к двум из них.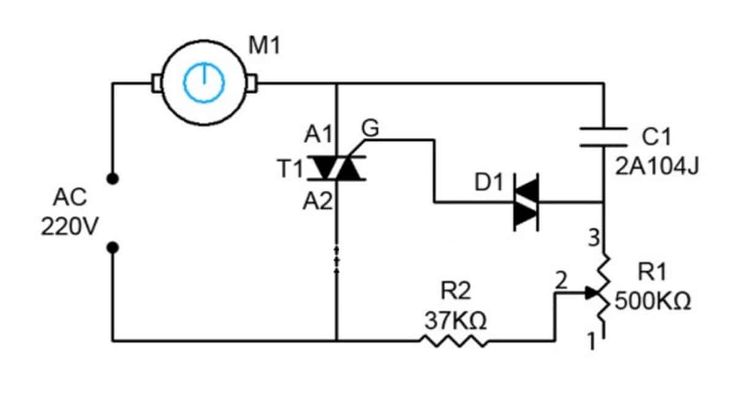 МОП-транзисторы получают сигналы от микроконтроллера, затем подают питание на двигатель, так что каждая из его катушек находится в одной из трех фаз: высокое напряжение, низкое напряжение или отключено/заземлено
МОП-транзисторы получают сигналы от микроконтроллера, затем подают питание на двигатель, так что каждая из его катушек находится в одной из трех фаз: высокое напряжение, низкое напряжение или отключено/заземлено
По мере вращения двигателя сигналы от МОП-транзисторов переключают фазы катушек, чтобы ротор продолжал вращаться. ESC использует постоянный ток в сочетании с системой переключателей для получения переменного трехфазного тока (рис. 4). Чем выше вход дроссельной заслонки, тем выше частота переключения, что приводит к более высоким оборотам двигателя. Существует несколько протоколов доставки сигналов, управляющих этим процессом, каждый из которых отличается производительностью и частотой сигнала.
Рисунок 4: Размыкание и замыкание переключателей в цепи ESC
Цепь выпрямителя батареи
ESC часто имеют встроенную цепь выпрямителя батареи (BEC), которая не устраняет необходимость в батарее, но действует как регулятор напряжения, устраняя необходимость в отдельной батарее для бортовой электроники. Питание, проходящее через BEC, падает до более низкого напряжения, обычно 5 В, которое безопасно питает приемник дроссельной заслонки и любые другие устройства на борту (рис. 5).
Питание, проходящее через BEC, падает до более низкого напряжения, обычно 5 В, которое безопасно питает приемник дроссельной заслонки и любые другие устройства на борту (рис. 5).
Рисунок 5: Электропроводка силовой установки, включая ESC и BEC обновления и использовать расширенные параметры программирования для настройки своего устройства. Это поддерживает актуальность ESC и позволяет управлять расширенными настройками, такими как отключение напряжения, режим калибровки дроссельной заслонки и направление вращения двигателя.
Этот компонент обычно зависит от марки и доступен не для всех ESC.
Рисунок 6: DMA от KDE Direct, совместимый с их ESC UAS
Что такое ШИМ
Широтно-импульсная модуляция (ШИМ) была первым протоколом ESC, и она используется по сей день. ШИМ использует синхронизированные импульсы мощности, чтобы сообщить двигателю, насколько быстро он должен вращаться, на основе данных, поступающих от контроллера дроссельной заслонки. Контроллер дроссельной заслонки посылает сигнал микроконтроллеру ESC, который сообщает ему, какое напряжение нужно снимать с батареи и подавать на ротор.
Контроллер дроссельной заслонки посылает сигнал микроконтроллеру ESC, который сообщает ему, какое напряжение нужно снимать с батареи и подавать на ротор.
Сигнал подается в виде импульсов, ширина которых определяет продолжительность подачи напряжения. Импульсы напряжения («включено») разделены периодами «выключения», когда напряжение не подается. Чем больше отношение времени «включено» к времени «выключено», тем больше мощности передается и тем быстрее будет вращаться ротор. Отношение времени «включено» к «выключено» также называется рабочим циклом.
В системе ШИМ длина импульсов варьируется от ~1000 мкс до ~2000 мкс. Первоначально импульсы отправлялись каждые 50 мс, но со временем это число увеличилось, поэтому сигнал отправляется каждые 2,04 мс (49).0 Гц). Если бы частота составляла 500 Гц, сигнал потенциально мог быть включен на 100%, что было бы определено как неисправность.
Драйвер затвора получает напряжение от микроконтроллера и подает его на полевые МОП-транзисторы, где он переключает их между тремя фазами.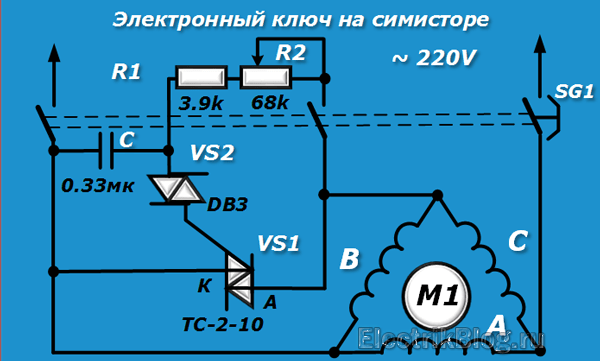 Чем больше напряжение поступает на МОП-транзисторы, тем быстрее они переключают фазы и тем быстрее вращается ротор.
Чем больше напряжение поступает на МОП-транзисторы, тем быстрее они переключают фазы и тем быстрее вращается ротор.
Если отложить время по оси X, а напряжение по оси Y, можно увидеть, как в этой системе контролируется или модулируется «ширина импульса» (рис. 7).
Рисунок 7: Длительность импульса в мс при минимальной и максимальной нагрузке
Вы можете оценить число оборотов в минуту, взяв среднее напряжение во времени (для обоих сигналов «вкл» и «выкл») и умножив его на номинальное значение Kv вашего двигателя. .
Протоколы ESC
Протокол ESC — это, по сути, язык, который полетные контроллеры используют для связи с ESC. Они используют уникальные шаблоны сигналов как способ передачи информации о дроссельной заслонке, изменяя скорость сигнала для изменения скорости вращения двигателя.
Общие протоколы ESC
До 2015 года PWM был единственным протоколом ESC, коммерчески используемым небольшими БПЛА. С тех пор было создано несколько новых протоколов, и аппаратное обеспечение, разработанное после 2017 года, обычно поддерживает все или большинство из них.
Наиболее часто используемые протоколы включают Oneshot125, Oneshot42, Multishot и Dshot300, Dshot600 и Dshot1200. Протоколы Oneshot и Multishot используют аналоговые сигналы, такие как PWM, тогда как Dshot (цифровой снимок) использует цифровой сигнал.
Аналоговые протоколы требуют калибровки, чтобы обеспечить синхронизацию генераторов (тактовых импульсов) в полетном контроллере и ESC, в то время как цифровые протоколы не требуют этого шага. Без этой калибровки ваш дрон может не реагировать должным образом из-за того, что ESC неправильно интерпретирует длину сигналов.
DShot
Dshot1200 — самый быстрый протокол, передающий 1 200 000 бит данных в секунду. Dshot1200 имеет фиксированную длину сигнала всего 13 мкс, что почти в два раза быстрее, чем у Multishot, следующего по скорости протокола, с длиной сигнала 25 мкс (рис. 8). Хотя Dshot1200 впечатляюще быстр, некоторые говорят, что на практике разница между Dshot600 и Dshot1200 незначительна.
Рисунок 8: Длина сигнала для распространенных протоколов в микросекундах
Меньшая задержка означает более быструю реакцию транспортного средства, но из-за инерции квадрокоптера и винтов уменьшается отдача, особенно для больших летательных аппаратов. Агрессивный полетный контроллер также потребляет значительно больше энергии, поэтому не рекомендуется использовать его, если он не требуется транспортному средству.
Агрессивный полетный контроллер также потребляет значительно больше энергии, поэтому не рекомендуется использовать его, если он не требуется транспортному средству.
Proshot
Proshot — это уникальный протокол, который содержит элементы как цифровых, так и аналоговых сигналов. Этот протокол кодирует сигнал DShot в импульсы ШИМ, каждый импульс содержит 4 бита данных. Это кодирование означает, что вы можете уместить 16-битные данные всего в 4 импульса ШИМ. Как и в случае с DShot, при использовании Proshot калибровка ESC не требуется.
Proshot1000 передает 1 000 000 бит данных в секунду, что немного меньше, чем у самого быстрого протокола DShot. Ведутся споры о том, какой протокол на практике имеет более высокую загрузку ЦП, но однозначного ответа пока нет.
С 2018 года на рынке появились регуляторы, поддерживающие Proshot через прошивку BLHeli_32.
ESC для бесщеточных двигателей
Как мы узнали, роль ESC заключается в контролируемой передаче энергии от аккумулятора к двигателю. Если вы введете 50% дроссельной заслонки на контроллере, ESC передаст 50% «мощности» двигателю. Что такое «мощность», зависит от используемой прошивки. Некоторые будут использовать среднее напряжение, подаваемое на двигатель, другие используют целевую скорость, а некоторые используют сочетание обоих.
Если вы введете 50% дроссельной заслонки на контроллере, ESC передаст 50% «мощности» двигателю. Что такое «мощность», зависит от используемой прошивки. Некоторые будут использовать среднее напряжение, подаваемое на двигатель, другие используют целевую скорость, а некоторые используют сочетание обоих.
С одной стороны ESC имеет два провода для подключения к аккумулятору: красный (плюс) и черный (минус) провод (рис. 9). На другом конце три провода, которые соединяют ESC с бесколлекторным двигателем. Если двигатель вращается в неправильном направлении после подключения его к ESC, переключение любых двух проводов заставит его вращаться в правильном направлении. Последнее расширение соединяется с приемником дроссельной заслонки, который питается от BEC.
Рисунок 9: ESC с проводкой для аккумулятора (слева), ресивера дроссельной заслонки (посередине) и подключения двигателя (справа)
Бесщеточный двигатель состоит из двух компонентов: ротора (содержащего постоянные магниты) и статора (содержащего медные катушки). Когда ток подается на катушку статора, она становится электромагнитом и развивает северный и южный полюса. Когда полярность электромагнита совпадает с полярностью постоянного магнита, с которым он сталкивается, их одинаковые полюса отталкиваются, и ротор вращается. Ток подается ESC в виде трехфазного сигнала, который постоянно меняет полярность электромагнитов, благодаря чему ротор продолжает вращаться.
Когда ток подается на катушку статора, она становится электромагнитом и развивает северный и южный полюса. Когда полярность электромагнита совпадает с полярностью постоянного магнита, с которым он сталкивается, их одинаковые полюса отталкиваются, и ротор вращается. Ток подается ESC в виде трехфазного сигнала, который постоянно меняет полярность электромагнитов, благодаря чему ротор продолжает вращаться.
Чтобы начать этот процесс, ESC должен знать положение ротора, чтобы иметь возможность выбирать, какие электромагниты активировать. Чтобы определить свое положение в двигателях с датчиками, ESC использует датчики Холла. Эта информация используется для точной синхронизации выходной фазы с углом ротора, чтобы обеспечить плавное ускорение. В двигателях без датчиков, которые чаще используются на БПЛА, процесс запуска немного менее надежен. ESC отправит предопределенную последовательность на двигатель, чтобы он запустился. Как только двигатель наберет достаточную скорость, обратной электромагнитной силы (обратной ЭДС) будет достаточно, чтобы ESC получил точную оценку положения и синхронизировал импульсы.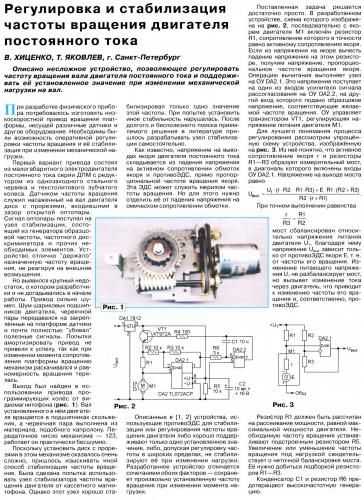
Для получения дополнительной информации ознакомьтесь с нашей статьей о том, как работают бесколлекторные двигатели
Регулятор скорости для дронов + Как выбрать регулятор
Выбор регулятора — важная часть процесса проектирования дрона. Вы хотите убедиться, что он удовлетворяет электрические потребности вашего самолета, не разряжая аккумулятор больше, чем необходимо. Ниже приведены несколько факторов, которые следует учитывать при выборе ESC.
Номинальный ток ESC
Номинальный ток ESC должен быть на 10–20 % выше, чем у двигателя. Это предотвратит его перегрев и обеспечит немного пространства для маневра при работе на максимальном дросселе. Вы не хотите идти намного выше этого диапазона, чтобы минимизировать вес. ESC должен быть испытан в условиях, близких к полету, так как основным ограничением является температурный режим. Высокая температура и плохая циркуляция воздуха снижают рейтинг ESC и срок службы. Некоторые ESC имеют два номинала тока: непрерывный и импульсный. Непрерывный ток устойчив в течение длительных периодов времени, а импульсный ток — только в течение коротких периодов.
Непрерывный ток устойчив в течение длительных периодов времени, а импульсный ток — только в течение коротких периодов.
Напряжение ESC
ESC имеют максимальное ограничение напряжения, которое может быть задано как диапазон напряжения или диапазон ячеек. Например, ESC, рассчитанный на ячейки 3S–8S, будет поддерживать напряжение 11,1–33,6 В. ESC может позволить вам установить напряжение отключения, которое будет предупреждать вас, когда напряжение батареи станет слишком низким (3,0–3,4 В на ячейку). ), чтобы не повредить батарею. Эти системы называются отключением при низком напряжении (LVC), и они снижают максимальную мощность, которую может обеспечить ESC. В конце концов, ESC выключит двигатель.
Регулятор 4-в-1 для квадрокоптера
При подключении регуляторов к квадрокоптеру вы можете использовать по одному регулятору для каждого двигателя или использовать регулятор 4-в-1 с одной платой и четырьмя разъемами для двигателей (рис. 10). Наличие четырех ECS может помочь распределить тепловую нагрузку, если двигатели потребляют большую мощность, а ESC 4-в-1 — отличный вариант для экономии места и ограничения веса оборудования.
Рисунок 10: ESC 4-в-1 от iFlight
Заключение
В этой статье мы рассмотрели основы ESC: как они работают, ключевые компоненты, протоколы и как они работают с бесщеточными моторы и дроны. Хорошее понимание этого важного компонента дрона может помочь вам улучшить свои знания и вашу сборку.
Для получения дополнительной информации об оптимизации вашего дрона ознакомьтесь с нашей бесплатной электронной книгой по сборке и оптимизации дронов.
Если у вас есть какие-либо вопросы, не стесняйтесь оставлять нам комментарии ниже.
Радиоуправляемые автомобили и грузовики Электронные регуляторы скорости
Быстрый просмотр
SPMXSE1160CP
Фирма 160A Smart ESC с конденсатором 3S — 8S
229,99 $
5 из 5 Рейтинг клиентов
Добавить в список желаний
Сравнить
Быстрый просмотр
SPMXSE1085
Бесщеточный Smart ESC фирмы 85A, 2S-3S
69,99 $
5 из 5 Рейтинг клиентов
Добавить в список желаний
Сравнить
Быстрый просмотр
SPMXSE1100
Firma 100A Бесколлекторный Smart ESC, 3S
99,99 $
5 из 5 Рейтинг клиентов
Добавить в список желаний
Сравнить
Быстрый просмотр
SPMXSE1120
Бесщеточный Smart ESC фирмы 120A, 3S-4S
119,99 $
4,7 из 5 Рейтинг клиентов
Добавить в список желаний
Сравнить
Быстрый просмотр
SPMXSE1150
Бесщеточный Smart ESC фирмы 150A, 3S-6S
159,99 $
5 из 5 Рейтинг клиентов
Добавить в список желаний
Сравнить
Быстрый просмотр
icon-rc-bonus
SPMXSE1160
Фирма 160A Brushless Smart ESC, 3S-8S
219,99 $
5 из 5 Рейтинг клиентов
Добавить в список желаний
Сравнить
Быстрый просмотр
SPMXSE1040RX
Firma 40A Brushed Smart 2-in-1 ESC и ресивер
64,99 $
4,8 из 5 Рейтинг клиентов
Добавить в список желаний
Сравнить
Быстрый просмотр
SPMXSEMC01
Фирма 85A Бесколлекторный Smart ESC / Бессенсорный двигатель 3300Kv Combo
104,99 $
4. 2 из 5 Рейтинг клиентов
2 из 5 Рейтинг клиентов
Добавить в список желаний
Сравнить
Быстрый просмотр
icon-rc-bonus
SPMXSEMC02
Firma 85A Brushless Smart ESC / 4000Kv Комбинированный мотор без датчика
104,99 $
5 из 5 Рейтинг клиентов
Добавить в список желаний
Сравнить
Быстрый просмотр
SPMXSEMC04
Firma 130A Brushless Smart ESC / 1900Kv Комбинированный мотор без датчика
$189,99
4,5 из 5 Рейтинг клиентов
Добавить в список желаний
Сравнить
Быстрый просмотр
icon-rc-bonus
SPMXSEMC05
Firma 150A Brushless Smart ESC / 2050Kv Комбинированный мотор без датчика
219,99 $
5 из 5 Рейтинг клиентов
Добавить в список желаний
Сравнить
Быстрый просмотр
SPMXSEMC06
Firma 160A Brushless Smart ESC / 1250Kv Комбинированный мотор без датчика
279,99 $
3,7 из 5 Рейтинг клиентов
Добавить в список желаний
Сравнить
Быстрый просмотр
SPMXSEMC10
Firma 70A Brushed Smart ESC, 2S-3S: IC3 / 15T Brushed Motor Combo
77,99 $
4. 2 из 5 Рейтинг клиентов
2 из 5 Рейтинг клиентов
Добавить в список желаний
Сравнить
Быстрый просмотр
SPMXSE2025RX
SLT 25A Матовый ESC/приемник: 1/16-1/18
29,99 $
5 из 5 Рейтинг клиентов
Добавить в список желаний
Сравнить
Быстрый просмотр
SPMXSER1025
Firma 25A 2-в-1 Brushed Smart ESC/Dual Protocol RX
$49,99
3,3 из 5 рейтинга клиентов
Добавить в список желаний
Сравнить
Быстрый просмотр
SPMXSE1070
Firma 70A Brushed Smart ESC, 2S-3S: IC3
51,99 $
5 из 5 Рейтинг клиентов
Добавить в список желаний
Сравнить
Быстрый просмотр
SPMXSE60
Firma 60A Lite Brushed Smart ESC, 2S-3S: IC3
49,99 $
3,3 из 5 рейтинга клиентов
Добавить в список желаний
Сравнить
Быстрый просмотр
SPMXSEM0501
Комбинированный бесколлекторный двигатель/ESC 2-в-1, 6000 кВ
82,99 $
5 из 5 Рейтинг клиентов
Добавить в список желаний
Сравнить
Быстрый просмотр
SPMXSE40
Firma 40A Lite Brushed Smart ESC, 2S-3S: IC3
39,99 $
4.